Portfoolio
2024: Digikaksik AI-põhise liikumise planeerimise ja juhtimise katsetamiseks kumerate pindade tõõtlemisel roboti abil
Projekti kestvus
2024

Projektijuht
Karl Kruusamäe
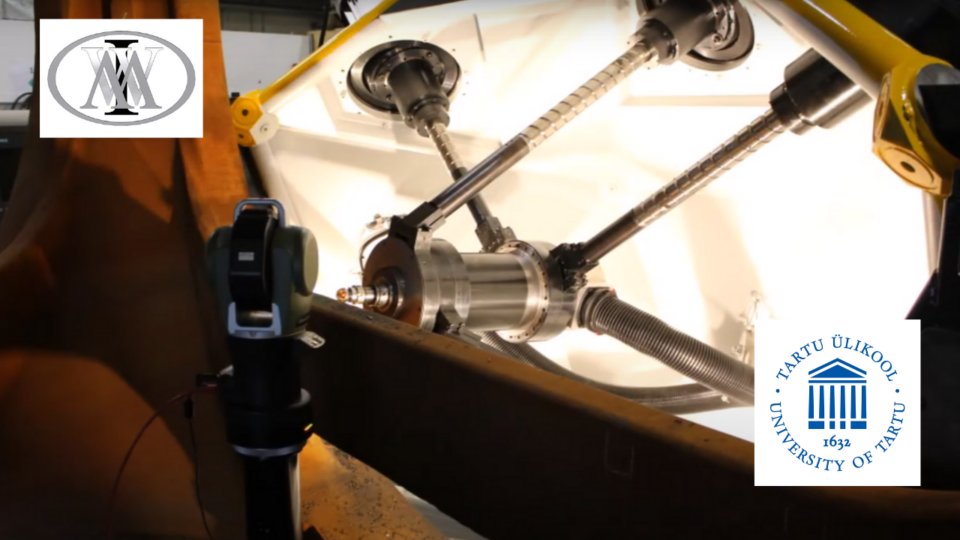
Tootmises on palju automatiseerimise valdkondi, mida ei saa automatiseerida või on automatiseerimise maksumus väikeste ja keskmise suurusega tootmisettevõtete jaoks äärmiselt kõrge. Üheks selliseks probleemiks on materjali töötlemine robotmanipulaatoritega, kus objektil on keeruline ja potentsiaalselt muutuv vorm. Näiteks on objektil kumerad pinnad ja roboti mõjur-tööriist peab ülesande, nagu lõikamine, täitmiseks täpselt seda kõverat pinda järgima. Antud projekti eesmärk on välja töötada digitkaksik kõverate pindade roboti abil töötlemiseks. Digikaksikut kasutatakse seejärel liikumise planeerimise algoritmide testimiseks, valideerimiseks ja võrdlemiseks, et saavutada mõjuri täpne liikumine mööda mistahes eeldefineeritud rada piki kõverat pinda ja kokkupõrkevaba liikumine.