Portfolio
2024: Digital twin for validation of AI-based motion planning and control for robot-assisted processing of curved surfaces
Project duration
2024

Project manager
Karl Kruusamäe
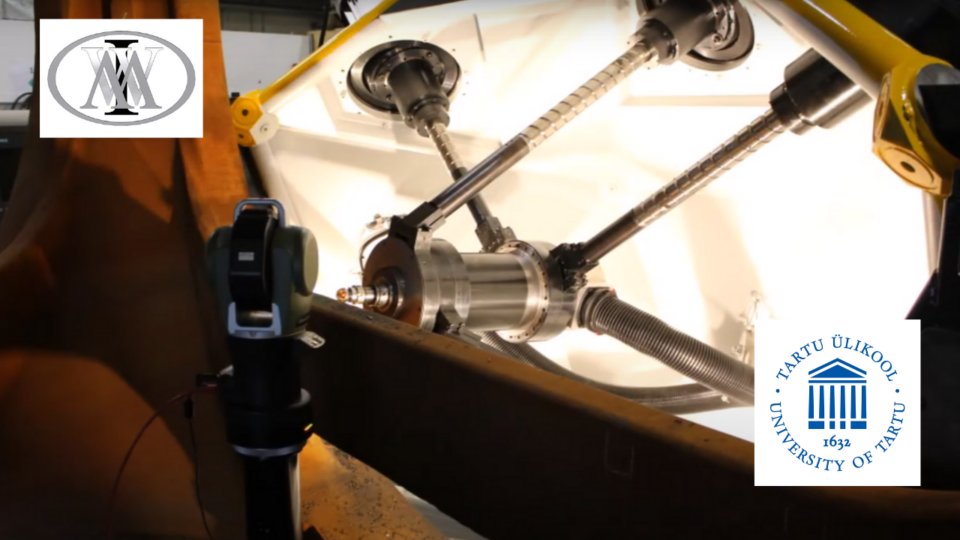
There are many areas of automation in manufacturing that cannot be automated, or the cost of automation is extremely high for small and medium-sized manufacturing companies. One such problem is material processing with robot manipulators where the object has a complex and potentially changeable form. For instance, the object has curved surfaces, and the robot’s end-effector tool needs to precisely follow this curved surface to complete a task such as milling. The goal of this project is to develop a digital twin of robot-assisted processing of curved surfaces. The digital twin will then be used to test, validate, and benchmark motion planning algorithms to achieve an accurate arbitrary path following for the end-effector along a curved surface and collision-free motion.