Portfoolio
2023: Robotmanipulaatoriga detailide paigutus rakiseta mootelauale

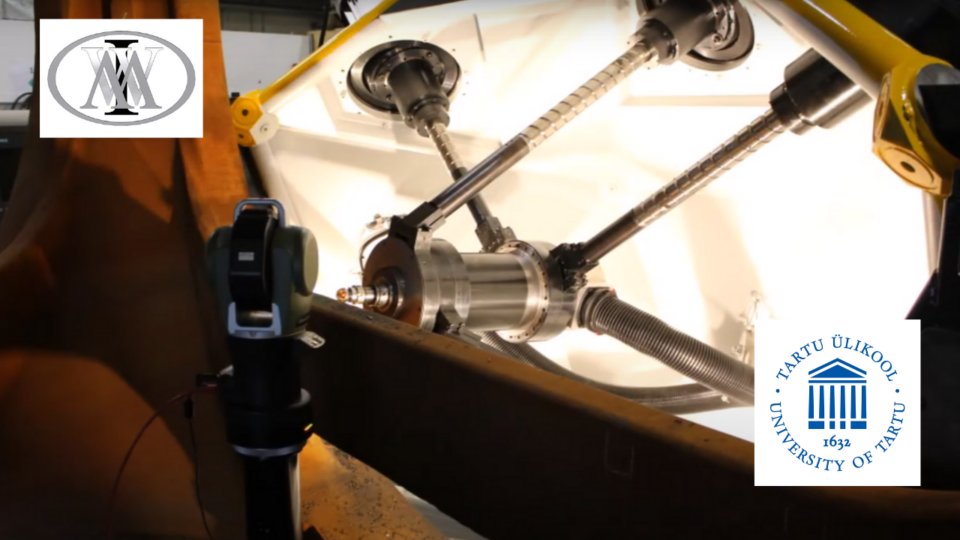
See töö keskendus tehisintellektiga täiustatud robotsüsteemi testimisele lõiketöödeldud detailide käsitsemise ja mõõtmise automatiseerimiseks koordinaatmõõtemasinaga. Nägemissüsteemiga ühendatud robotmanipulaator tuvastab ja haarab detailid, asetades need kontrollimiseks rakiseta mõõtelauale. Süsteem kasutab roboti operatsioonisüsteemi ROS ja MoveIt liikumise planeerimiseks ja suhtlemiseks, tagades täpse ja optimeeritud käsitsemise. Tehisintellekt on kaasatud objektide tuvastamise ja adaptiivse tee planeerimise parandamiseks, parandades süsteemi tõhusust ja töökindlust. Tehisintellekti juhitud automatiseerimise kohanemisel tööstuslike mõõtmisprotsessidega on selle lahenduse eesmärk optimeerida tootmise kvaliteedikontrolli, vähendada inimeste sekkumist ja tõsta üldist tootmise efektiivsust. Sellel lähenemisviisil on potentsiaalseid rakendusi CNC-masinate teenendamisel, automatiseeritud kontrollis ja tööstus 4.0-põhistes nutikates tootmiskeskkondades.